
04.neuvector进程策略生成与管控实现
neuvector进程策略生成与管控实现
一、进程学习管控的实现方式
策略学习实现:
进程的学习与告警主要依据通过netlink socket实时获取进程启动和退出的事件:
1.创建netLink socket;
2.通过创建netlink的fd对进程的事件进行捕获与更新,主要是4种类型(exec,fork,exit,uidChange);
3.学习模式下则对捕获的进程信息进行上报,形成对应的进程白名单,监视模式则对比当前白名单规则选择是否告警;
策略管控实现:
关于neuvector对进程的管控,虽然都是通过对比白名单策略,但是实际上可分为两条路径, 一种是基于fanotify实现的通过阻塞进程进行判断是否放行,另一种是基于syscall的形式(syscall.Kill(pid, syscall.SIGKILL))直接杀死进程,但不会阻塞;
两者之间的选择主要由capBlock属性决定;
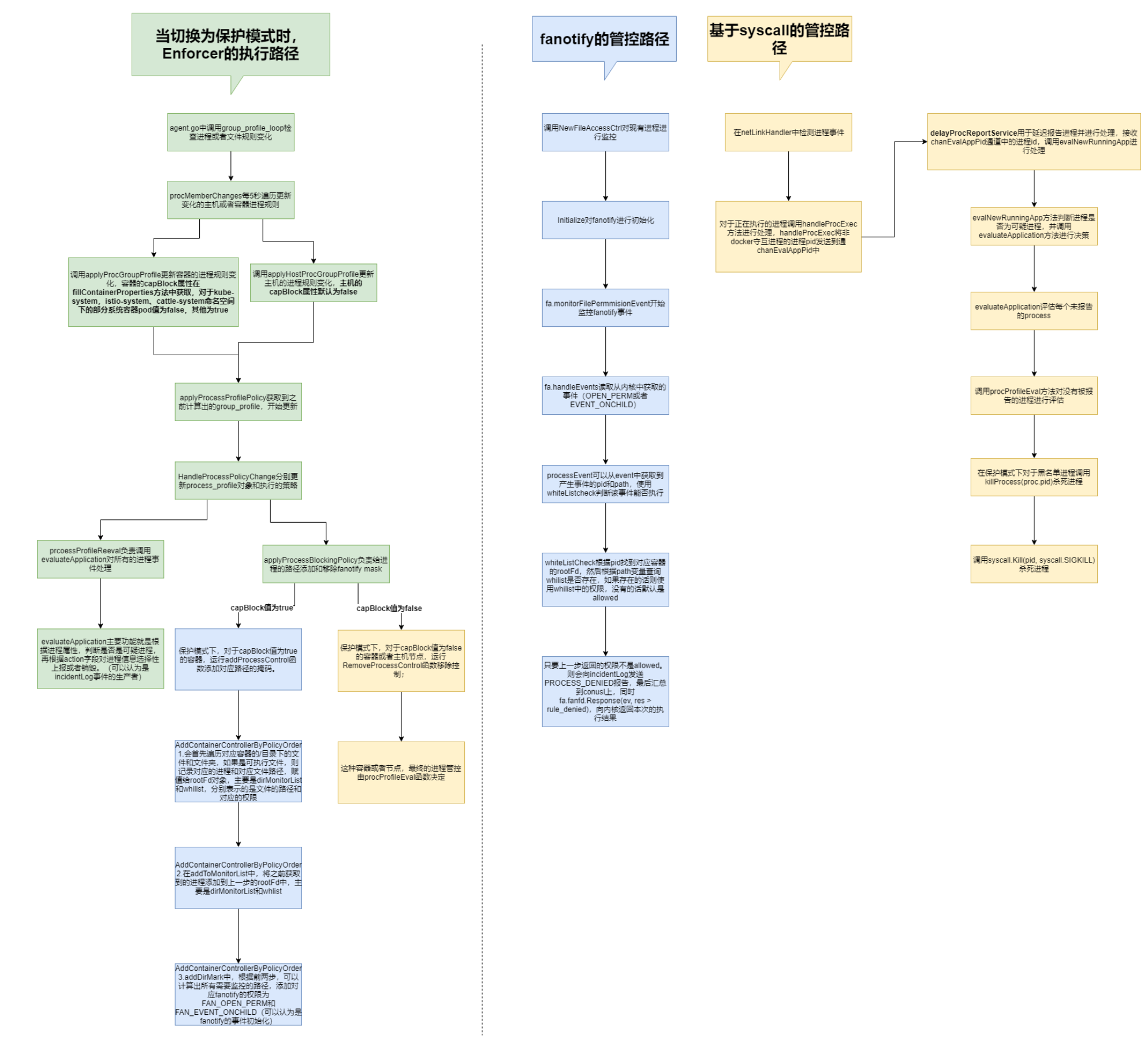
二、主要执行流程
保护模式下进程管控的主要流程如下图:
三、两种管控方式的使用场景以及优缺点(个人观点):
| 实现方式 | 使用场景 | 优点 | 缺点 |
|---|---|---|---|
| fanotify实现 | 业务容器、除去syscall.Kill场景下的 其他容器pod | 基于阻塞的方式管控进程,可以有 效防止黑名单进程执行 | 当容器或者pod中存在大量进程运行 时,阻塞的方式可能会导致容器中 进程运行速度变低, 所以不适用主 机节点以及进程较多的系统容器; |
| syscall.Kill(pid, syscall.SIGKILL) | 更多操作syscall.Kill(pid, syscall.SIGKILL) | 基于非阻塞的方式管控进程,不会 影响被管控容器或者pod的进程执行 速度; | 1.当进程执行速度很快或者Enforcer 通道通信过慢时,可能会来不及杀 死对应的黑名单进程; 2.当超过通道容量2048时,后续的 进程处理将被忽略 |
04.neuvector进程策略生成与管控实现
https://blog.longpi1.com/2023/12/29/04-neuvector进程策略生成与管控实现/