
18.实战:如何基于Raft从0到1构建一个支持多存储引擎分布式KV服务?
18.实战:如何基于Raft从0到1构建一个支持多存储引擎分布式KV服务?
本文笔记来自:「极客时间ETCD实战课」,原文链接:https://time.geekbang.org/column/article/354292?cid=100069901
今天聊聊如何实现一个类etcd、支持多存储引擎的KV服务,基于etcd自带的 raftexample 项目快速构建它。
为了方便后面描述,把它命名为metcd(表示微型的etcd),它是raftexample的加强版。希望通过metcd这个小小的实战项目,能够帮助进一步理解etcd乃至分布式存储服务的核心架构、原理、典型问题解决方案。
整体架构设计
在和你深入聊代码细节之前,首先我和你从整体上介绍下系统架构。
下面是我给你画的metcd整体架构设计,它由API层、Raft层的共识模块、逻辑层及存储层组成的状态机组成。
接下来,简要分析下API设计及复制状态机。

API设计
API是软件系统对外的语言,它是应用编程接口的缩写,由一组接口定义和协议组成。
在设计API的时候,往往会考虑以下几个因素:
- 性能。如etcd v2使用的是简单的HTTP/1.x,性能上无法满足大规模Kubernetes集群等场景的诉求,因此etcd v3使用的是基于HTTP/2的gRPC协议。
- 易用性、可调试性。如有的内部高并发服务为了满足性能等诉求,使用的是UDP协议。相比HTTP协议,UDP协议显然在易用性、可调试性上存在一定的差距。
- 开发效率、跨平台、可移植性。相比基于裸UDP、TCP协议设计的接口,如果你使用Protobuf等IDL语言,它支持跨平台、代码自动自动生成,开发效率更高。
- 安全性。如相比HTTP协议,使用HTTPS协议可对通信数据加密更安全,可适用于不安全的网络环境(比如公网传输)。
- 接口幂等性。幂等性简单来说,就是同样一个接口请求一次与多次的效果一样。若你的接口对外保证幂等性,则可降低使用者的复杂度。
因为我们场景的是POC(Proof of concept)、Demo开发,因此在metcd项目中,我们优先考虑点是易用性、可调试性,选择HTTP/1.x协议,接口上为了满足key-value操作,支持Get和Put接口即可。
假设metcd项目使用3379端口,Put和Get接口,如下所示。
- Put接口,设置key-value
1 | |
- Get接口,查询key-value
1 | |
复制状态机
了解完API设计,那最核心的复制状态机是如何工作的呢?
我们知道etcd是基于下图复制状态机实现的分布式KV服务,复制状态机由共识模块、日志模块、状态机组成。
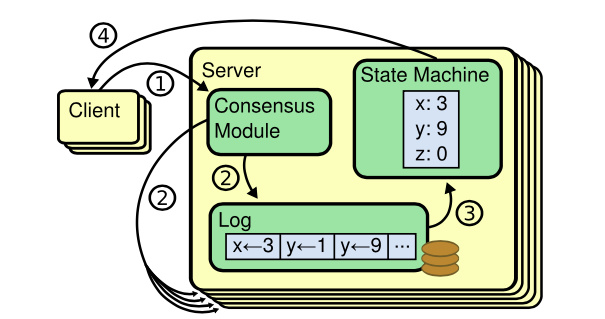
实战项目metcd,也正是使用与之一样的模型,并且使用etcd项目中实现的Raft算法库作为共识模块,此算法库已被广泛应用在etcd、cockroachdb、dgraph等开源项目中。
以下是复制状态机的写请求流程:
- client发起一个写请求(put hello = world);
- server向Raft共识模块提交请求,共识模块生成一个写提案日志条目。若server是Leader,则把日志条目广播给其他节点,并持久化日志条目到WAL中;
- 当一半以上节点持久化日志条目后,Leader的共识模块将此日志条目标记为已提交(committed),并通知其他节点提交;
- server从共识模块获取已经提交的日志条目,异步应用到状态机存储中(boltdb/leveldb/memory),然后返回给client。
多存储引擎
了解完复制状态机模型后,再深入介绍下状态机。状态机中最核心模块当然是存储引擎,那要如何同时支持多种存储引擎呢?
metcd项目将基于etcd本身自带的raftexample项目进行快速开发,而raftexample本身只支持内存存储。
因此通过将KV存储接口进行抽象化设计,实现支持多存储引擎。KVStore interface的定义如下所示。
1 | |
基于KV接口抽象化的设计,只需要针对具体的存储引擎,实现对应的操作即可。
我们期望支持三种存储引擎,分别是内存map、boltdb、leveldb,并做一系列简化设计。一组metcd实例,通过metcd启动时的配置来决定使用哪种存储引擎。不同业务场景不同实例,比如读多写少的存储引擎可使用boltdb,写多读少的可使用leveldb。
接下来重点介绍下存储引擎的选型及原理。
boltdb
boltdb是一个基于B+ tree实现的存储引擎库,在 之前文章详细介绍过原理。
boltdb为什么适合读多写少?
对于读请求而言,一般情况下它可直接从内存中基于B+ tree遍历,快速获取数据返回给client,不涉及经过磁盘I/O。
对于写请求,它基于B+ tree查找写入位置,更新key-value。事务提交时,写请求包括B+ tree重平衡、分裂、持久化ditry page、持久化freelist、持久化meta page流程。同时,ditry page可能分布在文件的各个位置,它发起的是随机写磁盘I/O。
因此在boltdb中,完成一个写请求的开销相比读请求是大很多的。一个3节点的8核16G空集群,线性读性能可以达到19万QPS,而写QPS仅为5万。
leveldb
那要如何设计适合写多读少的存储引擎呢?
最简单的思路当然是写内存最快。可是内存有限的,无法支撑大容量的数据存储,不持久化数据会丢失。
那能否直接将数据顺序追加到文件末尾(AOF)呢?因为磁盘的特点是顺序写性能比较快。
当然可以。 Bitcask 存储模型就是采用AOF模式,把写请求顺序追加到文件。Facebook的图片存储 Haystack 根据其论文介绍,也是使用类似的方案来解决大规模写入痛点。
那在AOF写入模型中如何实现查询数据呢?
很显然通过遍历文件一个个匹配key是可以的,但是它的性能是极差的。为了实现高性能的查询,最理想的解决方案从直接从内存中查询,但是内存是有限的,那么我们能否通过内存索引来记录一个key-value数据在文件中的偏移量,实现从磁盘快速读取呢?
是的,这正是 Bitcask 存储模型的查询的实现,它通过内存哈希表维护各个key-value数据的索引,实现了快速查找key-value数据。不过,内存中虽然只保存key索引信息,但是当key较多的时候,其对内存要求依然比较高。
快速了解完存储引擎提升写性能的核心思路(随机写转化为顺序写)之后,那leveldb它的原理是怎样的呢?与Bitcask存储模型有什么不一样?
leveldb是基于**LSM tree(log-structured merge-tree)**实现的key-value存储,它的架构如下图所示( 引用自微软博客)。
它提升写性能的核心思路同样是将随机写转化为顺序写磁盘WAL文件和内存,结合了我们上面讨论的写内存和磁盘两种方法。数据持久化到WAL文件是为了确保机器crash后数据不丢失。

那么它要如何解决内存不足和查询的痛点问题呢?
核心解决方案是分层的设计和基于一系列对象的转换和压缩。接下来分析一下上面架构图写流程和后台compaction任务:
- 首先写请求顺序写入Log文件(WAL);
- 更新内存的Memtable。leveldb Memtable后端数据结构实现是skiplist,skiplist相比平衡二叉树,实现简单却同样拥有高性能的读写;
- 当Memtable达到一定的阈值时,转换成不可变的Memtable,也就是只读不可写;
- leveldb后台Compact任务会将不可变的Memtable生成SSTable文件,它有序地存储一系列key-value数据。注意SST文件按写入时间进行了分层,Level层次越小数据越新。Manifest文件记录了各个SSTable文件处于哪个层级、它的最小与最大key范围;
- 当某个level下的SSTable文件数目超过一定阈值后,Compact任务会从这个level的SSTable中选择一个文件(level>0),将其和高一层级的level+1的SSTable文件合并;
- 注意level 0是由Immutable直接生成的,因此level 0 SSTable文件中的key-value存在相互重叠。而level > 0时,在和更高一层SSTable合并过程中,参与的SSTable文件是多个,leveldb会确保各个SSTable中的key-value不重叠。
了解完写流程,读流程也就简单了,核心步骤如下:
- 从Memtable跳跃表中查询key;
- 未找到则从Immutable中查找;
- Immutable仍未命中,则按照leveldb的分层属性,因level 0 SSTable文件是直接从Immutable生成的,level 0存在特殊性,因此你需要从level 0遍历SSTable查找key;
- level 0中若未命中,则从level 1乃至更高的层次查找。level大于0时,各个SSTable中的key是不存在相互重叠的。根据manifest记录的key-value范围信息,可快递定位到具体的SSTable。同时leveldb基于 bloom filter 实现了快速筛选SSTable,因此查询效率较高。
更详细原理可以参考一下 leveldb 源码。
实现分析
从API设计、复制状态机、多存储引擎支持等几个方面你介绍了metcd架构设计后,接下来我就和你重点介绍下共识模块、状态机支持多存储引擎模块的核心实现要点。
Raft算法库
共识模块使用的是etcd Raft算法库,它是一个经过大量业务生产环境检验、具备良好可扩展性的共识算法库。
它提供了哪些接口给你使用? 如何提交一个提案,并且获取Raft共识模块输出结果呢?
Raft API
Raft作为一个库,它对外最核心的对象是一个名为 Node 的数据结构。Node表示Raft集群中的一个节点,它的输入与输出接口如下图所示,下面重点介绍它的几个接口功能:
- Campaign,状态转换成Candidate,发起新一轮Leader选举;
- Propose,提交提案接口;
- Ready,Raft状态机输出接口,它的返回是一个输出Ready数据结构类型的管道,应用需要监听此管道,获取Ready数据,处理其中的各个消息(如持久化未提交的日志条目到WAL中,发送消息给其他节点等);
- Advance,通知Raft状态机,应用已处理上一个输出的Ready数据,等待发送下一个Ready数据;
- TransferLeaderShip,尝试将Leader转移到某个节点;
- Step,向Raft状态机提交收到的消息,比如当Leader广播完MsgApp消息给Follower节点后,Leader收到Follower节点回复的MsgAppResp消息时,就通过Step接口将此消息提交给Raft状态机驱动其工作;
- ReadIndex,用于实现线性读。

上面提到的Raft状态机的输出 Ready结构 含有哪些信息呢? 下图是其详细字段,含义如下:
- SoftState,软状态。包括集群Leader和节点状态,不需要持久化到WAL;
- pb.HardState,硬状态。与软状态相反,包括了节点当前Term、Vote等信息,需要持久化到WAL中;
- ReadStates,用于线性一致性读;
- Entries,在向其他节点发送消息之前需持久化到WAL中;
- Messages,持久化Entries后,发送给其他节点的消息;
- Committed Entries,已提交的日志条目,需要应用到存储状态机中;
- Snapshot,快照需保存到持久化存储中;
- MustSync,HardState和Entries是否要持久化到WAL中;
了解完API后,接下来继续看看代码如何使用Raft的Node API。
etcd Raft库的设计抽象了网络、Raft日志存储等模块,它本身并不会进行网络、存储相关的操作,上层应用需结合自己业务场景选择内置的模块或自定义实现网络、存储、日志等模块。
因此在使用Raft库时,需要先自定义好相关网络、存储等模块,再结合上面介绍的Raft Node API,就可以完成一个Node的核心操作了。其数据结构定义如下:
1 | |
这个数据结构名字叫raftNode,它表示Raft集群中的一个节点。它是由我们业务应用层设计的一个组合结构。从结构体定义中你可以看到它包含了Raft核心数据结构Node(raft.Node)、Raft日志条目内存存储模块(raft.MemoryStorage)、WAL持久化模块(wal.WAL)以及网络模块(rafthttp.Transport)。
同时,它提供了三个核心的管道与业务逻辑模块、存储状态机交互:
- proposeC,它用来接收client发送的写请求提案消息;
- confChangeC,它用来接收集群配置变化消息;
- commitC,它用来输出Raft共识模块已提交的日志条目消息。
在metcd项目中因为是直接基于raftexample定制开发,因此日志持久化存储、网络都使用的是etcd自带的WAL和rafthttp模块。
WAL 模块中提供了核心的保存未持久化的日志条目和快照功能接口。
rafthttp 模块基于HTTP协议提供了各个节点间的消息发送能力,metcd使用如下:
1 | |
搞清楚Raft模块的输入、输出API,设计好raftNode结构,复用etcd的WAL、网络等模块后,接下来就只需要实现如下两个循环逻辑,处理业务层发送给proposeC和confChangeC消息、将Raft的Node输出Ready结构进行相对应的处理即可。精简后的代码如下所示:
1 | |
代码简要分析如下:
- 从proposeC中取出提案消息,通过raft.Node.Propose API提交提案;
- 从confChangeC取出配置变更消息,通过raft.Node.ProposeConfChange API提交配置变化消息;
- 从raft.Node中获取Raft算法状态机输出到Ready结构中,将rd.Entries和rd.HardState通过WAL模块持久化,将rd.Messages通过rafthttp模块,发送给其他节点。将rd.CommittedEntries应用到业务存储状态机。
以上就是Raft实现的核心流程,接下来聊聊业务存储状态机。
支持多存储引擎
在整体架构设计时,介绍了为了使metcd项目能支撑多存储引擎,将KVStore进行了抽象化设计,因此只需要实现各个存储引擎相对应的API即可。
这里以Put接口为案例,分别介绍下各个存储引擎的实现。
boltdb
首先是boltdb存储引擎,它的实现如下。
1 | |
leveldb
其次是leveldb,我们使用的是 goleveldb,它基于Google开源的c++ leveldb 版本实现。它提供的常用API如下所示。
- 通过OpenFile API创建或打开一个leveldb数据库。
1 | |
- 通过DB.Get/Put/Delete API操作数据。
1 | |
了解其接口后,通过goleveldb的库,client调用就非常简单了,下面是metcd项目中,leveldb存储引擎Put接口的实现。
1 | |
读写流程
介绍完在metcd项目中如何使用Raft共识模块、支持多存储引擎后,再从整体上介绍下在metcd中写入和读取一个key-value的流程。
写流程
当通过如下curl命令发起一个写操作时,写流程如下面架构图序号所示:
1 | |
- client通过curl发送HTTP PUT请求到server;
- server收到后,将消息写入到KVStore的ProposeC管道;
- raftNode循环逻辑将消息通过Raft模块的Propose接口提交;
- Raft模块输出Ready结构,server将日志条目持久化后,并发送给其他节点;
- 集群多数节点持久化此日志条目后,这个日志条目被提交给存储状态机KVStore执行;
- KVStore根据启动的backend存储引擎名称,调用对应的Put接口即可。

读流程
当通过curl命令发起一个读操作时,读流程如下面架构图序号所示:
1 | |
- client通过curl发送HTTP Get请求到server;
- server收到后,根据KVStore的存储引擎,从后端查询出对应的key-value数据。

小结
如何基于Raft从0到1构建一个支持多存储引擎的分布式key-value数据库。
在整体架构设计上,介绍了API设计核心因素,它们分别是性能、易用性、开发效率、安全性、幂等性。其次介绍了复制状态机的原理,它由共识模块、日志模块、存储状态机模块组成。最后深入分析了多存储引擎设计,重点介绍了leveldb原理,它将随机写转换为顺序写日志和内存,通过一系列分层、创新的设计实现了优异的写性能,适合读少写多。
在实现分析上,重点介绍了Raft算法库的核心对象Node API。对于一个库而言,我们重点关注的是其输入、输出接口,业务逻辑层可通过Propose接口提交提案,通过Ready结构获取Raft算法状态机的输出内容。其次介绍了Raft算法库如何与WAL模块、Raft日志存储模块、网络模块协作完成一个写请求。
最后为了支持多存储引擎,分别基于boltdb、leveldb实现了KVStore相关接口操作,并通过读写流程图,从整体上介绍了一个读写请求在metcd中是如何工作的。
问题
raftexample 启动的时候是如何工作的吗?它的存储引擎内存map是如何保证数据不丢失的呢?