
13.db大小:为什么etcd社区建议db大小不超过8G?
13.db大小:为什么etcd社区建议db大小不超过8G?
本文笔记来自:「极客时间ETCD实战课」,原文链接:https://time.geekbang.org/column/article/354292?cid=100069901
在写流程中分享了etcd Quota模块,那么etcd为什么需要对db增加Quota限制,以及不建议etcd集群db大小超过8G呢? 过大的db文件对集群性能和稳定性有哪些影响?
今天分享的主题就是关于db大小。将通过一个大数据量的etcd集群为案例,剖析etcd db大小配额限制背后的设计思考和过大的db潜在隐患。
帮助理解大数据量对集群的各个模块的影响,配置合理的db Quota值。同时,帮助在实际业务场景中,遵循最佳实践,尽量减少value大小和大key-value更新频率,避免db文件大小不断增长。
分析整体思路
首先写入大量数据,构造一个db大小为14G的大集群。然后通过此集群分析db大小的各个影响面,db大小影响面如下图所示。
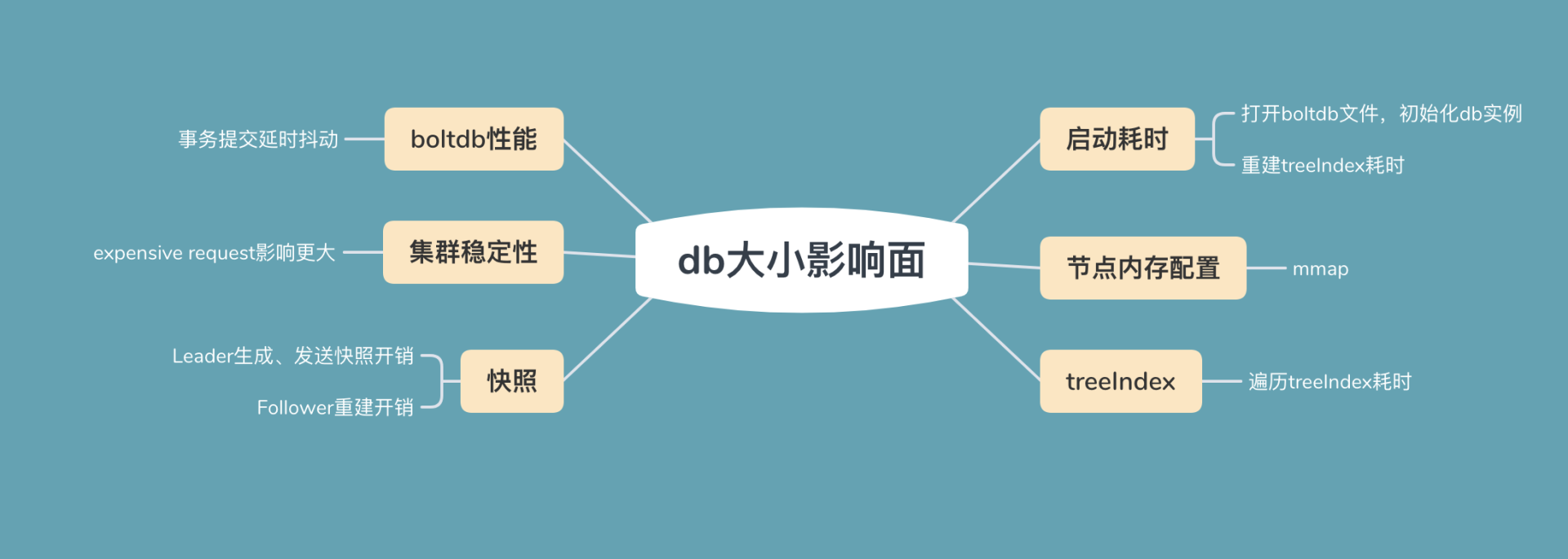
首先是 启动耗时。etcd启动的时候,需打开boltdb db文件,读取db文件所有key-value数据,用于重建内存treeIndex模块。因此在大量key导致db文件过大的场景中,这会导致etcd启动较慢。
其次是 节点内存配置。etcd在启动的时候会通过mmap将db文件映射内存中,若节点可用内存不足,小于db文件大小时,可能会出现缺页文件中断,导致服务稳定性、性能下降。
接着是 treeIndex 索引性能。因etcd不支持数据分片,内存中的treeIndex若保存了几十万到上千万的key,这会增加查询、修改操作的整体延时。
然后是 boltdb性能。大db文件场景会导致事务提交耗时增长、抖动。
再次是 集群稳定性。大db文件场景下,无论你是百万级别小key还是上千个大value场景,一旦出现expensive request后,很容易导致etcd OOM、节点带宽满而丢包。
最后是 快照。 当Follower节点落后Leader较多数据的时候,会触发Leader生成快照重建发送给Follower节点,Follower基于它进行还原重建操作。较大的db文件会导致Leader发送快照需要消耗较多的CPU、网络带宽资源,同时Follower节点重建还原慢。
构造大集群
简单介绍完db大小的六个影响面后,我们下面来构造一个大数据量的集群,用于后续各个影响面的分析。
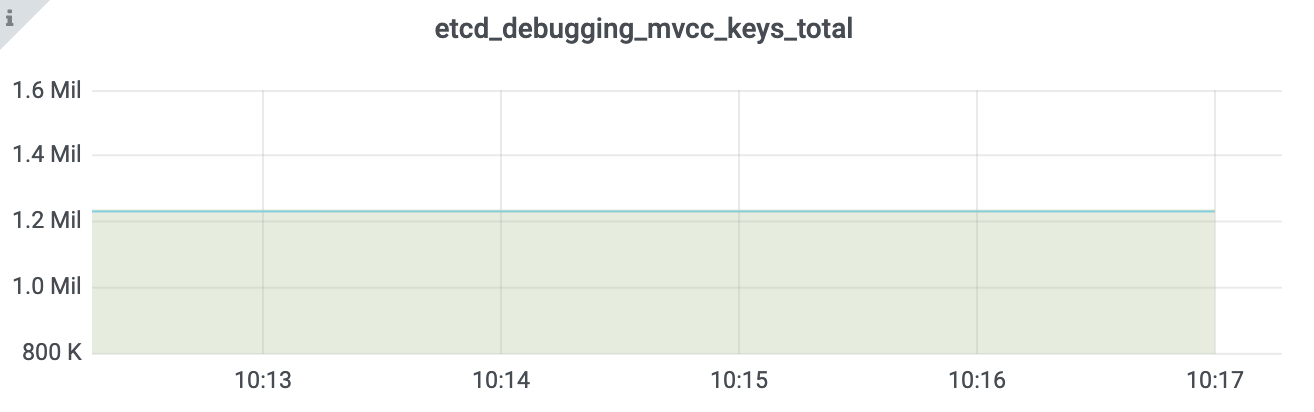
首先,我通过一系列如下 benchmark 命令,向一个8核32G的3节点的集群写入120万左右key。key大小为32,value大小为256到10K,用以分析大db集群案例中的各个影响面。
1 | |
执行完一系列benchmark命令后,db size达到14G,总key数达到120万,其监控如下图所示:

启动耗时
在如上的集群中,我通过benchmark工具将etcd集群db大小压测到14G后,在重新启动etcd进程的时候,如下日志所示,你会发现启动比较慢,为什么大db文件会影响etcd启动耗时呢?
1 | |
通过对etcd启动流程增加耗时统计,我们可以发现核心瓶颈主要在于打开db文件和重建内存treeIndex模块。
这里介绍下etcd启动后,重建内存treeIndex的原理。
我们知道treeIndex模块维护了用户key与boltdb key的映射关系,boltdb的key、value又包含了构建treeIndex的所需的数据。因此etcd启动的时候,会启动不同角色的goroutine并发完成treeIndex构建。
首先是主goroutine。 它的职责是遍历boltdb,获取所有key-value数据,并将其反序列化成etcd的mvccpb.KeyValue结构。核心原理是基于etcd存储在boltdb中的key数据有序性,按版本号从1开始批量遍历,每次查询10000条key-value记录,直到查询数据为空。
其次是构建treeIndex索引的goroutine。 它从主goroutine获取mvccpb.KeyValue数据,基于key、版本号、是否带删除标识等信息,构建keyIndex对象,插入到treeIndex模块的B-tree中。
因可能存在多个goroutine并发操作treeIndex,treeIndex的Insert函数会加全局锁,如下所示。etcd启动时只有一个 构建treeIndex索引的goroutine,因此key多时,会比较慢。之前我尝试优化成多goroutine并发构建,但是效果不佳,大量耗时会消耗在此锁上。
1 | |
节点内存配置
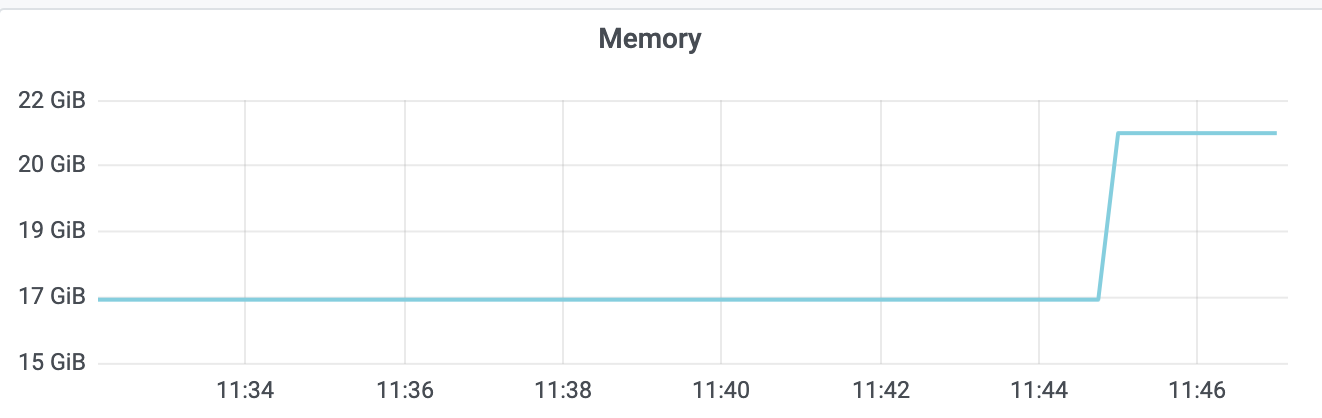
etcd进程重启完成后,在没任何读写QPS情况下,如下所示,会发现etcd所消耗的内存比db大小还大一点。这又是为什么呢?如果etcd db文件大小超过节点内存规格,会导致什么问题吗?
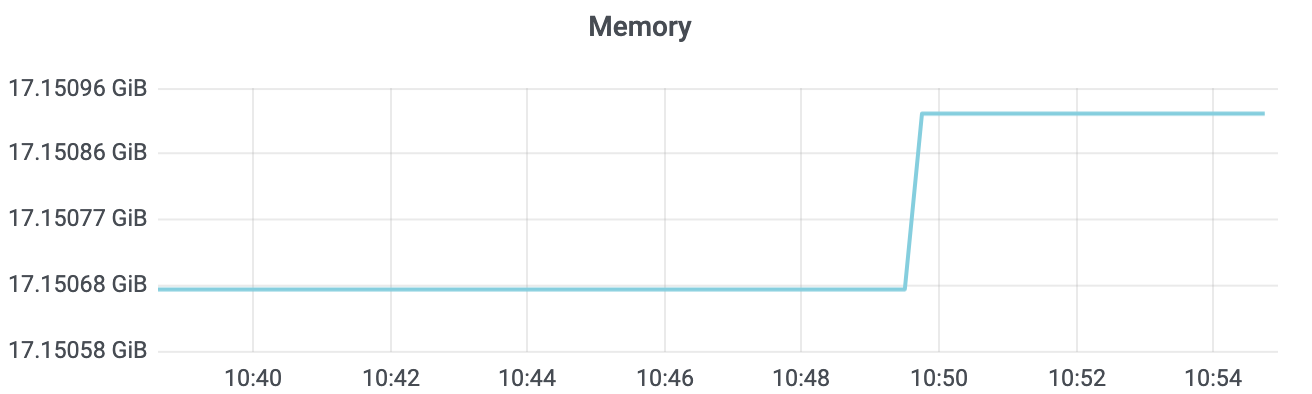
etcd在启动的时候,会通过boltdb的Open API获取数据库对象,而Open API它会通过mmap机制将db文件映射到内存中。
由于etcd调用boltdb Open API的时候,设置了mmap的MAP_POPULATE flag,它会告诉Linux内核预读文件,将db文件内容全部从磁盘加载到物理内存中。
因此在你节点内存充足的情况下,启动后你看到的etcd占用内存,一般是db文件大小与内存treeIndex之和。
在节点内存充足的情况下,启动后,client后续发起对etcd的读操作,可直接通过内存获取boltdb的key-value数据,不会产生任何磁盘IO,具备良好的读性能、稳定性。
而当你的db文件大小超过节点内存配置时,若你查询的key所相关的branch page、leaf page不在内存中,那就会触发主缺页中断,导致读延时抖动、QPS下降。
因此为了保证etcd集群性能的稳定性,建议etcd节点内存规格要大于你的etcd db文件大小。
treeIndex
当我们往集群中写入了一百多万key时,此时你再读取一个key范围操作的延时会出现一定程度上升,这是为什么呢?我们该如何分析耗时是在哪一步导致的?
在etcd 3.4中提供了trace特性,它可帮助我们定位、分析请求耗时过长问题。不过你需要特别注意的是,此特性在etcd 3.4中,因为依赖zap logger,默认为关闭。你可以通过设置etcd启动参数中的–logger=zap来开启。
开启之后,我们可以在etcd日志中找到类似如下的耗时记录。
1 | |
此日志记录了查询请求”etcdctl get –prefix /vip/a”。它在treeIndex中查询相关key耗时95ms,从boltdb遍历key时47ms。主要原因还是此查询涉及的key数较多,高达一万九。
也就是说若treeIndex中存储了百万级的key时,它可能也会产生几十毫秒到数百毫秒的延时,对于期望业务延时稳定在较小阈值内的业务,就无法满足其诉求。
boltdb性能
当db文件大小持续增长到16G乃至更大后,从etcd事务提交监控metrics你可能会观察到,boltdb在提交事务时偶尔出现了较高延时,那么延时是怎么产生的呢?
在 介绍boltdb的原理时,关于db文件的磁盘布局,它是由meta page、branch page、leaf page、free list、free页组成的。同时我给你介绍了boltdb事务提交的四个核心流程,分别是B+ tree的重平衡、分裂,持久化dirty page,持久化freelist以及持久化meta data。
事务提交延时抖动的原因主要是在B+ tree树的重平衡和分裂过程中,它需要从freelist中申请若干连续的page存储数据,或释放空闲的page到freelist。
freelist后端实现在boltdb中是array。当申请一个连续的n个page存储数据时,它会遍历boltdb中所有的空闲页,直到找到连续的n个page。因此它的时间复杂度是O(N)。若db文件较大,又存在大量的碎片空闲页,很可能导致超时。
同时事务提交过程中,也可能会释放若干个page给freelist,因此需要合并到freelist的数组中,此操作时间复杂度是O(NLog N)。
假设我们db大小16G,page size 4KB,则有400万个page。经过各种修改、压缩后,若存在一半零散分布的碎片空闲页,在最坏的场景下,etcd每次事务提交需要遍历200万个page才能找到连续的n个page,同时还需要持久化freelist到磁盘。
为了优化boltdb事务提交的性能,etcd社区在bbolt项目中,实现了基于hashmap来管理freelist。通过引入了如下的三个map数据结构(freemaps的key是连续的页数,value是以空闲页的起始页pgid集合,forwardmap和backmap用于释放的时候快速合并页),将申请和释放时间复杂度降低到了O(1)。
freelist后端实现可以通过bbolt的FreeListType参数来控制,支持array和hashmap。在etcd 3.4版本中目前还是array,未来的3.5版本将默认是hashmap。
1 | |
另外在db中若存在大量空闲页,持久化freelist需要消耗较多的db大小,并会导致额外的事务提交延时。
若未持久化freelist,bbolt支持通过重启时扫描全部page来构造freelist,降低了db大小和提升写事务提交的性能(但是它会带来etcd启动延时的上升)。此行为可以通过bbolt的NoFreelistSync参数来控制,默认是true启用此特性。
集群稳定性
db文件增大后,另外一个非常大的隐患是用户client发起的expensive request,容易导致集群出现各种稳定性问题。
本质原因是etcd不支持数据分片,各个节点保存了所有key-value数据,同时它们又存储在boltdb的一个bucket里面。当你的集群含有百万级以上key的时候,任意一种expensive read请求都可能导致etcd出现OOM、丢包等情况发生。
那么有哪些expensive read请求会导致etcd不稳定性呢?
首先是简单的count only查询。 如下图所示,当你想通过API统计一个集群有多少key时,如果你的key较多,则有可能导致内存突增和较大的延时。
在etcd 3.5版本之前,统计key数会遍历treeIndex,把key追加到数组中。然而当数据规模较大时,追加key到数组中的操作会消耗大量内存,同时数组扩容时涉及到大量数据拷贝,会导致延时上升。
其次是limit查询。 当你只想查询若干条数据的时候,若你的key较多,也会导致类似count only查询的性能、稳定性问题。
原因是etcd 3.5版本之前遍历index B-tree时,并未将limit参数下推到索引层,导致了无用的资源和时间消耗。优化方案是将limit参数下推到了索引层,实现查询性能百倍提升。
最后是大包查询。 当你未分页批量遍历key-value数据或单key-value数据较大的时候,随着请求QPS增大,etcd OOM、节点出现带宽瓶颈导致丢包的风险会越来越大。
问题主要由以下两点原因导致:
第一,etcd需要遍历treeIndex获取key列表。若你未分页,一次查询万级key,显然会消耗大量内存并且高延时。
第二,获取到key列表、版本号后,etcd需要遍历boltdb,将key-value保存到查询结果数据结构中。如下trace日志所示,一个请求可能在遍历boltdb时花费很长时间,同时可能会消耗几百M甚至数G的内存。随着请求QPS增大,极易出现OOM、丢包等。etcd这块未来的优化点是实现流式传输。
1 | |
快照
大db文件最后一个影响面是快照。它会影响db备份文件生成速度、Leader发送快照给Follower节点的资源开销、Follower节点通过快照重建恢复的速度。
etcd提供了快照功能,帮助我们通过API即可备份etcd数据。当etcd收到snapshot请求的时候,它会通过boltdb接口创建一个只读事务Tx,随后通过事务的WriteTo接口,将meta page和data page拷贝到buffer即可。
但是随着db文件增大,快照事务执行的时间也会越来越长,而长事务则会导致db文件大小发生显著增加。
也就是说当db大时,生成快照不仅慢,生成快照时可能还会触发db文件大小持续增长,最终达到配额限制。
为什么长事务可能会导致db大小增长呢?
快照的另一大作用是当Follower节点异常的时候,Leader生成快照发送给Follower节点,Follower使用快照重建并追赶上Leader。此过程涉及到一定的CPU、内存、网络带宽等资源开销。
同时,若快照和集群写QPS较大,Leader发送快照给Follower和Follower应用快照到状态机的流程会耗费较长的时间,这可能会导致基于快照重建后的Follower依然无法通过正常的日志复制模式来追赶Leader,只能继续触发Leader生成快照,进而进入死循环,Follower一直处于异常中。
小结
首先大db文件首先会影响etcd启动耗时,因为etcd需要打开db文件,初始化db对象,并遍历boltdb中的所有key-value以重建内存treeIndex。
其次,较大db文件会导致etcd依赖更高配置的节点内存规格,etcd通过mmap将db文件映射到内存中。etcd启动后,正常情况下读etcd过程不涉及磁盘IO,若节点内存不够,可能会导致缺页中断,引起延时抖动、服务性能下降。
接着treeIndex维护了所有key的版本号信息,当treeIndex中含有百万级key时,在treeIndex中搜索指定范围的key的开销是不能忽略的,此开销可能高达上百毫秒。
然后当db文件过大后,boltdb本身连续空闲页的申请、释放、存储都会存在一定的开销。etcd社区已通过新的freelist管理数据结构hashmap对其进行优化,将时间复杂度降低到了O(1),同时支持事务提交时不持久化freelist,而是通过重启时扫描page重建,以提升etcd写性能、降低db大小。
随后介绍了db文件过大后,count only、limit、大包查询等expensive request对集群稳定性的影响。建议你的业务尽量避免任何expensive request请求。
最后介绍了大db文件对快照功能的影响。大db文件意味着更长的备份时间,而更长的只读事务则可能会导致db文件增长。同时Leader发送快照与Follower基于快照重建都需要较长时间,在集群写请求较大的情况下,可能会陷入死循环,导致落后的Follower节点一直无法追赶上Leader。